Robotics: Autobots Transform in the Offshore Energy Sector






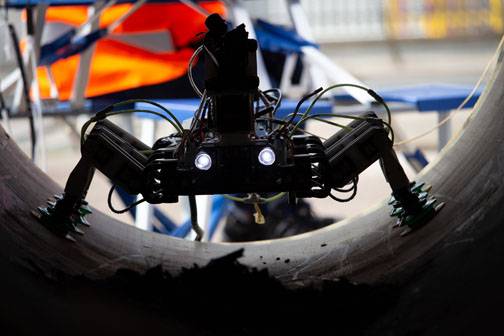
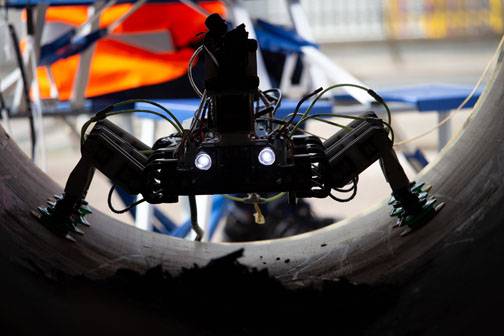 BladeBUG is a blade walking inspection robot, focusing on leading edge erosion inspection. Images from ORE Catapult.
BladeBUG is a blade walking inspection robot, focusing on leading edge erosion inspection. Images from ORE Catapult.
 “In a production plant, everything is pretty static and controlled. It’s easy to separate moving things from non-moving things and people from robotics,” says Alex Loudon, the UK’s Offshore Renewable Energy (ORE) Catapult. “Everything is linear, there’s no wind, waves or currents to get in the way. It’s so much easier to implement automation. When you think about offshore wind, it’s a different beast entirely, because of the operating environment.”
“In a production plant, everything is pretty static and controlled. It’s easy to separate moving things from non-moving things and people from robotics,” says Alex Loudon, the UK’s Offshore Renewable Energy (ORE) Catapult. “Everything is linear, there’s no wind, waves or currents to get in the way. It’s so much easier to implement automation. When you think about offshore wind, it’s a different beast entirely, because of the operating environment.”
 Hub-89: The Heriot-Watt University wheeled Husky robot used to demonstrate practical self-certification as part of an offshore inspection mission.
CUTHub 201
Hub-89: The Heriot-Watt University wheeled Husky robot used to demonstrate practical self-certification as part of an offshore inspection mission.
CUTHub 201
 Prototypes of the OWCR have been trialed at onshore facilities that replicate offshore structures. Images from the Oil & Gas Technology Center.
Prototypes of the OWCR have been trialed at onshore facilities that replicate offshore structures. Images from the Oil & Gas Technology Center.
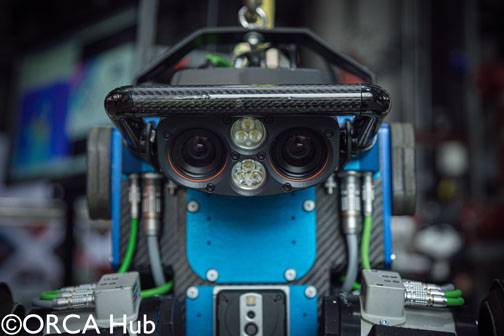
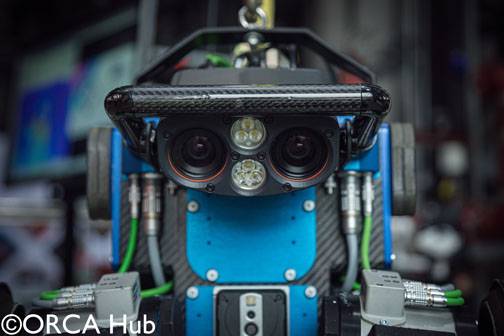 The University of Edinburgh’s quadruped ANYmal robot used to demonstrate obstacles navigation for inspection tasks using a thermal camera. Copyright ORCA Hub
The University of Edinburgh’s quadruped ANYmal robot used to demonstrate obstacles navigation for inspection tasks using a thermal camera. Copyright ORCA Hub
 OGRIP: The Oil & Gas Technology Centre is working with companies on the Offshore Ground Robotics Industrial Pilot (OGRIP) prototype, which is now what it calls the world’s first Offshore Work Class Robot (OWCR), shown here at SPE Offshore Europe last year. Photo from SPE Offshore Europe.
OGRIP: The Oil & Gas Technology Centre is working with companies on the Offshore Ground Robotics Industrial Pilot (OGRIP) prototype, which is now what it calls the world’s first Offshore Work Class Robot (OWCR), shown here at SPE Offshore Europe last year. Photo from SPE Offshore Europe.




Robots and robotics have slowly been entering our lives, in various shapes and forms (and fictional characters), from self-driving household vacuum cleaners to highly automated manufacturing systems. Now they’re heading for the offshore world – in just as many shapes and forms.
There could be a lot to gain from robotics, but platforms and offshore wind turbine structures are also very challenging places to put them on. For oil and gas, key drivers are around safety and cost . For the offshore wind sector, the sheer volume of structures being installed is driving a push for robotic systems to do inspection, maintenance, and repair work safely, efficiently, and cost-effectively.
So, where are we today? Robotics, depending on how you define it, isn’t entirely new to the offshore industry. Remotely operated vehicles with intricate manipulators have been used for decades, albeit in a fairly manual way, and are now becoming more sophisticated and specialized. Automated pipe handling systems and robotic roughnecks have been introduced to drill floors more recently (OE November 2016: Batteries not included). In the past few years, aerial drones and magnetic hull crawling robots have become part of the offshore inspection tool kit, also mostly with a human operator. In fact, this May saw the first delivery by drone to an offshore vessel (the Pioneering Spirit, in Rotterdam, by Dutch Drone Delta). (More on that here: https://bit.ly/3cWQDuy)
Some tentative steps have also been made into topside robotics, from quadrupeds to crawlers, some in response to concerns around hydrogen sulphide (H2S), which is deadly to humans, and others in response to specific incidents - Total would have been able to act faster in response to the Elgin/Franklin gas leak in 2012 had it had a suitable robotic system on board, for example.
What’s now underway is a drive to get those systems already being used able to do more themselves and for newer platforms to be more offshore ready, for tasks from internal inspection to grit-blasting and even X-rays and repairs on wind turbine blades. It’s not an easy task and the challenges are not all robotic.
Reducing risk and emissions
“Robotics take people out of harsh environments and could be more efficient,” and they could also help meet net-zero emissions goals, reducing the need for helicopter flights, etc., says Andy Bell, Project Manager, Asset Integrity Solution Center, at the publicly-funded Oil & Gas Technology Center (OGTC). But offshore facilities weren’t designed for robotics and robotics can’t function as well as humans. “Simple things, like climbing stairs, we take for granted, robots can’t,” he says.
“In a production plant, everything is pretty static and controlled. It’s easy to separate moving things from non-moving things and people from robotics,” says Alex Louden, Innovation Manager at the UK’s Offshore Renewable Energy (ORE) Catapult. “Everything is linear, there’s no wind, waves or currents to get in the way. It’s so much easier to implement automation. When you think about offshore wind, it’s a different beast entirely, because of the operating environment.”
 Equinor has been trialing System T, from Surface Dynamics, a portable robotic surface treatment system for sand or hydro-blasting ballast and other tanks. Photo from Equinor.
Equinor has been trialing System T, from Surface Dynamics, a portable robotic surface treatment system for sand or hydro-blasting ballast and other tanks. Photo from Equinor.
A raft of new systems
Still, there are plenty of ongoing projects. The OGTC has been working with drone firms Air Control Entech and Fly Logix on aerial systems. Air Control Entech developed three drones – one for flying in higher winds, one with laser scanning capability, and one with ultrasonic non-destructive testing capability, says Bell. In its first project with the OGTC, Fly Logix’s worked on a drone capable of “beyond visual line of sight” (BVLOS). Its latest project with the OGTC is to develop a drone for methane monitoring, using long-distance fixed-wing drones. “There’s not a one size fits all,” says Bell, “there will be different solutions for different applications. I think the technology is there, we just need to start trialling it in the field and learning from the outcomes. Deployment is key to learning what these robotic systems can and can’t do.”
A similar ethos is likely to persist for topsides-based robotics – for oil and gas and offshore wind. Here, concepts are even more divergent. Some steps have been made in this area.
In 2017, OC Robotic’s snake arm robot (a tracked vehicle with an arm able to enter pressure vessels), was billed as the first offshore robot when it was trialled on Chevron’s Alba platform in 2017, then, in 2018, the quadruped ANYmal robot made a debut on a Dutch offshore wind converter station.
Time for trials
Total is now getting closer to trialing a robot co-developed with Taurob, initially for 12 months onshore at its Shetland Gas Plant, while in Norway Aker BP has plans to trial a number of systems, including a Boston Dynamics Spot quadruped, on the Skarv floating production vessel ,and Oxford Robotics Institute has been testing an adapted ANYmal quadruped for its suitability offshore at a fire training center.
A lot of the work done to date has been enabling vehicles to navigate around a site – known and unknown, with visual aids, eg. cameras, lidar, inertial measurement units, artificial intelligence etc. Taurob’s latest robot, developed with Total, will add gas detection capability, as well as microphones with algorithms to detect frequencies from valves and pumps to spot anomalies and enable preventative action. Another Taurob project, Offshore Work Class Robot, also currently in development and co-funded by the OGTC, Total and Equinor, is adding manipulator capability to the vehicle, says Bell.
Over in Norway, Aker BP and data analytics firm Cognite are set to test Spot, a Boston Dynamics quadruped, offshore on the Skarv FPSO. Spot, which has been equipped with a precision acoustic sensor to identify non-conformities in offshore machinery, has been risk-assessed and approved for offshore use in non-classified areas, says Cognite. In the trials, Cognite staff will test the interface between various offshore operational systems and its Cognite Data Fusion platform, to test and verify how the robot can perform remote inspections supported by onshore personnel, for the likes of routine inspections, reducing travel, HSE risk and operational ability to detect anomalous situations, says Cognite.
Since 2017, Equinor has been using System T, from Surface Dynamics; a portable robotic surface treatment system for sand or hydro-blasting ballast and other tanks. It’s set to test a treatment and painting system (System P) from the same company in full-scale trials later this year. Equinor is also trailing HXCI (Heat Exchanger Cleaning & Inspection), an in-situ cleaning and inspection system prototype due to tested on a site on land in 2021. Equinor is also working with Total on the Taurob robot. Hub-50: University of Oxford’s quadruped ANYmal robot using its laser sensor to navigate its route at the ORE Catapult facility in Blyth. Copyright ORCA Hub
Hub-50: University of Oxford’s quadruped ANYmal robot using its laser sensor to navigate its route at the ORE Catapult facility in Blyth. Copyright ORCA Hub
Doing the dull and dirty work
Similar capability is being worked on in the UK. Quantum Leap Technology (QL Tech) is developing a robot to perform fabric maintenance, i.e. to detect a rusty surface and then prepare it by bristle blasting before applying a coating – a task that otherwise costs a typical UK offshore platform about £5-10 million a year, according to the OGTC.
Fabric inspection and maintenance is also a big challenge in offshore wind. There are already several systems being developed for specific tasks, with ORE Catapult support. InnoTecUK’s iFROG, for example, is an amphibious non-destructive testing inspection robot climbing an internal and external monopile foundations, to help inspect welds and corrosion above and down to 60m below the waterline using ultrasonic testing. The procedure is currently done by divers or ROVs and is reliant on weather windows.
Another, RadBlad, by Innovotek working with London South Bank Innovation Center, Forth Engineering, Renewable Advice and The Welding Institute, is looking to deploy a robotic system able to scale towers and perform radiography on blades to detect blade defects not detectable using current inspection methods. Around 3,800 blade failures per year are down to failures to inspect and maintain them at an early stage, according to ORE Catapult. Another, BladeBug, is a blade walking inspection robot, focusing on leading edge erosion inspection when it’s too windy for drones.
Autonomy in offshore wind
But, the asset base in offshore wind is so vast, the challenge is also getting to each turbine safely and efficiently. Wind turbine operators are focusing on smart and automated systems, that self-diagnose, but inspection will still be needed. So, a dual approach is being led by the ORE Catapult using unmanned surface vessels (USVs) through the MIMREE (Multi-Platform Inspection, Maintenance, and Repair in Extreme Environments). Basically, think all of the above in one system. Eight firms are involved in MIMREE using a Halcyon autonomous vessel from Thales, a BladeBug with a robotic repair arm from the Royal College of Art’s Robotics Laboratory, a drone from the University of Bristol, an electronic skin developed by a tech start-up, Wootzano, to ‘feel’ surfaces. Others are working on systems to deploy these systems and human-machine interfaces.
A similar USV-drone pairing is being developed in Brazil by Repsol, the Universidade Federal do Rio de Janeiro, and USV firm Tidewise for oil spill detection. Their ARIEL project involves a USV deploying a drone (both with oil spill detectors; camera and thermal on the drone and fluorometer on the USV) to find and track oil spills.
These are just a few examples. There are other organizations working in this space, such as the Offshore Robotics for the Certification of Assets (ORCA) Hub, based in Edinburgh, and the more recent EU-funded Atlantis Test Centre for maritime robotics for offshore wind, in Portugal, which is focusing in inspection, maintenance and repair systems, and commercial enterprises doing their own work.
Moving beyond visual sight
A lot of what’s been done to date is about robots making decisions based on visual cues, says Bell, so they understand and can navigate around their environment and react to obstacles. The next step is repair and maintenance. Louden agrees. “Inspection is the low hanging fruit,” he says. “The next level is commercial repairs.”
The challenges are communication and BVLOS – and reliability. Early testing of Taurob’s robot highlighted communications as a challenge – and that’s before you go offshore. The same will apply for aerial drones. There’s a similar challenge in offshore wind. Systems could use satellite communications, says Louden, but it costs a lot. All these systems will also need to be able to speak to one another to deliver efficiencies.
There’s also a need to access power. While turbines appear a ready source of power, there’s no three-point plug for systems to tap into, and it’s the same for communications. Power and communications cables (or private or 4G networks) would need to be run from converter stations to where power users need them, he says. Alternatively, wave or tidal power devices could be installed to support resident robotic systems, like underwater inspection vehicles.
Reliability and certification
Then there’s the reliability of vehicles themselves. “For robotics to be fully integrated into commercial practice, barriers relating to their long-term reliability as well as their ability to operate safely with humans in the same environment need to be addressed,” says an OTC 2020 paper from Heriot-Watt University, a member of the ORCA Hub. “The use of BVLOS robotics requires a new methodology in dynamic certification,” it says, so it’s been looking at self-certification, enabling robots to verify their health status and ability to deliver missions.
Future visions
“In the near term, there will be a hybrid approach, personnel working with robotics,” he says. “The future vision is taking the human out of the loop. But we’re 10-15 years from that. These early pilots at Shetland Gas Plant will (help to) understand the reliability of the robot. Right now, we don’t know.”
But advances are being made. Current operating and charging life of a Taurob type robot is 3-4 hours operating, then about double that for charging. An OGTC project with Taurob, Total, Equinor, and French battery maker SAFT is developing an ATEX approved battery that will enable four-hour operating then four-hour charging, so with two robots there would be 24-hour operations (so long as they were reliable, of course).
For greenfield sites, the vision could be very different – it could be unmanned automated facilities with crawlers or a rack-type system with a robotic arm that moves around. “These are questions being asked just now,” says Bell.
Another challenge is technology adoption. Technology barriers are probably the easiest to overcome, says Bell, adoption could be harder, with concerns about jobs or disrupting incumbent markets – like the logistics and transportation for people and equipment currently shipped around. Wootzano: An electronic skin developed by a tech start-up, Wootzano, to ‘feel’ surfaces. Image from ORE Catapult.
Wootzano: An electronic skin developed by a tech start-up, Wootzano, to ‘feel’ surfaces. Image from ORE Catapult.


